

軟件技術在汽車衡防作弊方麵的應用
【摘 要】 針對(duì)電子汽車衡中常見的作弊類型,本(běn)文通(tōng)過對這些作弊方式的分析、研究,提出了在實際工作中(zhōng)用軟件來解決這些問(wèn)題的方法(fǎ),並較好的(de)投入到實際工(gōng)作中,為維護企業(yè)的經濟利益又增添了一道防線。
一、問題的提(tí)出
電子汽車衡作為一種準(zhǔn)確(què)、方便、快捷的(de)稱重計量(liàng)設備被越來越(yuè)多地應用在煤炭、冶金、建材、電力等各行業中。然而在很(hěn)多地區出現了利(lì)用電子汽車衡在計量過程(chéng)中(zhōng)進行稱重作弊的現象,采用各種方式在車輛計量毛重、皮重時做手腳,造(zào)成少則幾百公斤、多則幾噸的計量偏差,從中非法牟利。這些(xiē)作弊種類包括:對稱重傳感器到儀表的電子線路(lù)私(sī)接非法裝置,來達到計量作弊的(de)目的; 對計量(liàng)車輛采取帶掛車過重,單車回(huí)皮(pí)的手段(duàn),來達到提高淨重的目的;隨著現在車輛長度的增長, 秤體也在增長,使得計(jì)量員在觀察車(chē)輛在秤上的計量位置是否合理時有較大的難度,容易使不法人員(yuán)鑽空子,采用壓秤、不完全(quán)上秤等作(zuò)弊手段;計量員受(shòu)非法(fǎ)分子的威脅或利誘,在微機稱量確認環節上(shàng)作手腳,改變稱量結果。這些作弊情況如不及(jí)時發現,會給企(qǐ)業造成巨大的經濟損失。因此, 國內各計量科研院所、衡器(qì)生產廠家都在衡器防做弊方麵(miàn)做了大量的研究。迄今為止,大多數防作弊技術采用硬件的檢測方式(如(rú)外加攝像頭、光電傳感器), 存在較大的局限(xiàn)性:隻能對某種(zhǒng)作弊方式進(jìn)行判斷;硬件安裝在室外,容易受到不法分子破壞;新添硬件增大了維護人員的工作量, 設備的投入;作弊情況的判斷需要人為參與(例如通過攝像頭觀察台麵情況),係統的客觀真實性很難保(bǎo)證(zhèng)。
計(jì)算機現已成為一般電子汽車衡實現管理現代化的標配部件。而計算機具有邏(luó)輯判斷能力、運算速度快、工作自動化等特點,是否能利用計算機(jī)軟件實現汽車衡防作(zuò)弊係統的“軟(ruǎn)”解決方案? 達到計算機集稱(chēng)重、防作弊為一身的新型計量稱重係統,成為我(wǒ)們研究的重點。
二、汽(qì)車衡作弊(bì)的常見類型
(一)無線遙控作弊
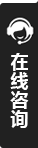
這種作弊方法是利用計量點(diǎn)夜間無人看守(shǒu)或不容易被發(fā)現時,剝開室外傳感器送往儀表(biǎo)
線(xiàn),串入電子設(shè)備(帶有(yǒu)無線接收裝置),如圖 1 如示。當車輛計(jì)量時,用遙控器控製這些電子設備,從而對送(sòng)往儀表的信號產生影響,計量的結果可大、可(kě)小,來(lái)獲得非法所得。由與設計這些作弊裝置的人員本身對電子汽車衡的(de)構造、原理相當清楚(chǔ),所以這些裝置很難在計量過程中被發現。
(二)汽車壓(yā)在(zài)地麵、多車(chē)壓秤(chèng)作弊
汽車壓在地麵是指計(jì)量時,司機故意(yì)把(bǎ)車停在不正確的位置上,造(zào)成計量結果偏小。多車壓秤指一台車輛計量時,其它非計量車輛的輪子(zǐ)故意壓在秤上,造成計量結果偏大。(如圖 2 所示)
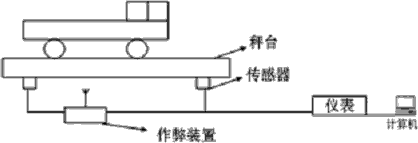 |
圖 1
 |
圖(tú) 2
(三)計量員人為作弊
現階段微機雖然已引(yǐn)入(rù)計量工作(zuò)中,但主要是將數據庫管理係統(tǒng)及其應用軟件裝入微機中,發揮了微機數據管理(lǐ)的功能,計量(liàng)的終結果仍是由計量員得出。這樣(yàng)計量的(de)重要環節(jiē)和傳統的計量(liàng)方式存在有相同(tóng)的弊病,計量結果容易受人為的影響。計量員可能受經濟利益的(de)驅使,在稱量過程(chéng)中(zhōng)協助非法(fǎ)人(rén)員作弊(bì)。較(jiào)典型的是計量員(yuán)利用微機(jī)稱(chēng)量數據的終結果是靠人工確(què)認(如敲擊回車鍵確(què)認或用(yòng)鼠標(biāo)點(diǎn)擊確認)的特點,從中確(què)認不合理的數據,或對上(shàng)邊(二)所發(fā)生的事情視(shì)而 不見。
三、問題的(de)分析、解決
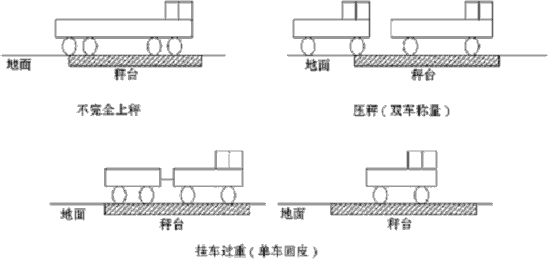
用軟件來解決以上問題,需能找出其中一些(xiē)共性的規律(lǜ)。經過對汽車衡正(zhèng)常計量情況(kuàng)時的多組數據采集、分析,發現這樣一個規(guī)律(圖 3 表示,該圖是在(zài)兩軸汽車(chē)的計量過程中得出的,多軸車與(yǔ)此類似):O 到 a1 表示前輪上秤(chèng)的過程,秤台的負重變化較大,因此儀表讀數上升較快;a1 到 a2 表示(shì)前輪上秤(chèng)後(hòu),汽車仍在行進,但後輪未上秤,此(cǐ)時秤台的(de)負重變化不大,所(suǒ)以儀表的讀數的(de)暫時(shí)穩定;a2 到 b1 表示後輪上秤的(de)過程,秤台的負重變化很大(dà),儀表讀(dú)數迅速上升;b1 到 b2 表示前輪,後輪均上秤,儀表(biǎo)讀數的穩定;下秤時與上述的過程相反。a1 到 a2 是前輪單獨在秤台行進過程時(shí)的重(chóng)量(liàng),而 c1 到 c2 表示後輪(lún)單(dān)獨在秤台(tái)行進過程時的重量,兩(liǎng)者之和大約是 b1 到(dào) b2 區間的平均重量,即整個車的重量。
 |
圖 3
軟件的(de)設計思路是(shì)記錄(lù)車輛在計量時的全部數據(包括(kuò)上衡、下衡的過程數據),通過和正常計量(無作弊發(fā)生)下的數據比較,來找到解決方法。
對於作弊情況 1,在非法信號串入傳感器的信號線(xiàn)後(hòu),儀表的顯示肯定與正常計量(liàng)情況時有所(suǒ)差別(理論依據:目前使用的傳感器和接線盒全(quán)部是純(chún)電阻部(bù)件,上(shàng)麵的電流、電壓是可以(yǐ)突變(biàn)的。作弊裝置是通過繼電器的吸合來使外接電阻對(duì)稱重信號產生影響,繼電器的動(dòng)作很短(毫秒級),這使得稱重信(xìn)號會有明顯跳變;正(zhèng)常情況下,傳感器的(de)彈性元件因受力發生形變,通過電阻應變片將其轉換為電阻值的(de)變化,從而測得被測力的大小,其時間較前者要慢很多。)。但(dàn)此差別,憑人的肉眼觀察是較難發現的(de),即使能觀察到,但每天大量的汽車計量,也(yě)很容易造成觀測者的疲勞,影響觀測(cè)的準確性。現在正是要把這(zhè)個工作交給速度快,準確(què)性(xìng)高的(de)微機來完成。如圖(tú) 3 所示,如果作弊現象(xiàng)發生在 a2 到 c1 之(zhī)間,即通過電子裝置較大幅度增大或減小 b1 到 b2 的區間中的(de)重量,顯然達不(bú)到以上標準(zhǔn)的要求(即兩平台的重量接(jiē)近於中間平台的重量,即使(shǐ)有誤差,也應在一定的範(fàn)圍內),因而軟件可以很(hěn)好的排除這種作弊現象; 如(rú)果(guǒ)作弊現象發(fā)生在 a1-a2、c1-c2 段,會(huì)導致這兩段本應平滑(huá)稱量曲線有凸起現象,作弊信號(hào)越大,凸起(qǐ)越明(míng)顯,軟件越容易判別。對於 a1 之前和(hé)c2 之後的稱(chēng)量段,是(shì)指車輛前輪上衡(héng)和後輪下衡的瞬間,時間特別短,這裏如果(guǒ)進行(háng)遙控作弊時間很難掌握,往往會落(luò)在其它區域,可不予考慮(lǜ)。
對於作弊情況(kuàng) 2,如果(guǒ)計量車輛沒完全上秤,或(huò)者有多車壓秤現象,其計量數據波形會於標準的波形相差很大,波形平台會多於或少於圖 3 所示波形,較(jiào)容易識別。
對於作弊情況 3,即計量員對計量(liàng)數據施加影響。其人為作弊方式就是把(bǎ)本應在汽車停穩後(b1 到 b2)確認計量結果的過程,放在 b1 之前(qián)或 b2 之後,使皮重(chóng)計量結果偏輕,來達到淨重值的提高。其解決方式采取計算機自動出示計量數據(取 b1 到 b2 的均值),不需要人工幹預,這樣就保證了計量結果的客觀性(xìng),準確性。
四、係統的(de)實(shí)現
(一)軟件部分
軟件的開發工(gōng)具選用 VB6.0,主要基於它簡單易學,具有種類繁多、功(gōng)能強大控件的這些特點, 而且大多工控板卡廠商提供的(de)各自產品的(de)二次開發實例都是用該語言編程。這樣利於(yú)提高軟件開發的效率。
軟件需要對采集的數據進行以下處(chù)理或分析:
1. 軟件濾波
高速采集卡、儀表均(jun1)采集的(de)是稱重傳感器信號,十(shí)分微弱(微伏級),容易使幹擾侵入係統的前向通道,疊加在信號上,導致數據采集誤差加大(dà)。雖然數據抗幹擾性能根本在(zài)硬件(jiàn)結構,軟件抗幹擾隻是一個補充,但軟件的編製則要處處考慮(lǜ)到硬件可能(néng)的(de)失效,可能受到的幹擾(rǎo)等種種問題, 否則容易使上邊(biān)判別作弊方式的原則失效,產(chǎn)生錯判(pàn)、漏判。軟(ruǎn)件(jiàn)采(cǎi)用了遞推平均濾波法(又稱滑動平均濾波法):把連續取 N 個(gè)采(cǎi)樣值看成一個隊列,隊列的長度固定為 N,每次采樣(yàng)到一個新(xīn)數據放入隊尾,並扔掉原來隊首的一次數據。(先出原則(zé)),把隊列中的 N 個數據進行算術平均運算,就可獲得新的濾波結果。優點:對周(zhōu)期性幹擾有良好的(de)抑(yì)製作用,平滑度高;缺點:靈敏度(dù)低, 對偶然出現的脈衝性幹擾的(de)抑(yì)製作用較差(chà),不(bú)易消除由於脈衝幹擾所引起的采樣值偏差。實踐證明, 該種方(fāng)法在該係(xì)統中是較有效的。
無論采用哪種濾(lǜ)波方法,應遵循的原則:在盡量(liàng)濾(lǜ)除幹擾(rǎo)信號的同時,不致使作弊信號被濾掉或受到(dào)較大損失。
2. 波形平(píng)台(tái)判別
波形平台的正確判別對係統防作弊功能(néng)發揮起(qǐ)著關鍵(jiàn)作用。經(jīng)過軟件(jiàn)濾波處理後的數據已經比較規整,利於波形平台的判別。平台通過相鄰 n 個數據的跳變量(差量)來判斷,如(rú)果相鄰的 n 個數據差(chà)量(liàng)較穩定既認為進入(rù)一(yī)個平台;反之,認為平台結束。將平台的起點與終點的數據存入數組, 可以求出均值,即平台值。
3. 波形凸起現象(xiàng)判別(bié)
凸起仍是通過相鄰值的差量值來(lái)判別(bié),但這(zhè)裏需要找出(chū)的是因(yīn)作弊信號引(yǐn)起的凸起。經過濾波後的波形雖(suī)已經較平整(zhěng),但難免仍有不規則凸現現(xiàn)象,怎樣和作弊信號的凸起區分?這裏通過和預值(允許的差(chà)值量)的比較來判段,大於預值即(jí)認為有作弊發生,小於(yú)預值即認(rèn)為正(zhèng)常下的幹擾信號,可以濾去。因此預值的大小對於係統識別作弊的(de)精度、準(zhǔn)確(què)度(dù)有很(hěn)大關係,預值設的小, 係統對微小作(zuò)弊(bì)都能發現,但也會(huì)將幹(gàn)擾信號錯判;預值設的大,係統隻能對較大作(zuò)弊信號發現, 錯判率降低,但漏判情況會增大很多。兩者之間有矛盾,所以隻能找到一個(gè)平衡點(diǎn),盡量兼顧兩者。軟件設計(jì)中,是(shì)在標定秤體過(guò)程中通過(guò)對各個稱的實際稱量情況來自動設定該預值的。軟(ruǎn)件(jiàn)有一定的智能性、自學習性,可以根據每台(tái)秤運行過程中的實際情況作預值的動態改(gǎi)變。
(二)硬件部分
軟件的核心部分是微機對采集到的儀表數據按上述規律進行一(yī)定的算法處理。這要求稱重儀表既要有較高的采樣速(sù)率,便於微機對數據進行分析;又可以對原始的模擬信號中的幹擾、噪聲成分有濾波作用,減輕(qīng)軟件處理幹擾數據的壓力。稱重儀表(靜態秤儀(yí)表),能夠有效的濾除幹擾信號,但顯示更新速(sù)率較低,一般為 10 次/秒,不能滿足高速采樣要求。為此,在微機中添加了高速(sù)采集卡——PCI1710HG,它的采樣數(shù)率達(dá)100KS/s,能夠(gòu)在Windows 操作係統下勝任連續高速采集的任務(wù),具(jù)有(yǒu)可編程功能。采樣速率提高了,難免使濾波(bō)功能受到一定的(de)損失,較稱重儀表要差。實際(jì)係統中,軟件分別對稱重儀表、高速采集卡的數據分別采集。綜合兩組數據,進行數據分析,來確定作弊情(qíng)況是否發生。
(三)係統(tǒng)工作(如(rú)圖 4 所示)
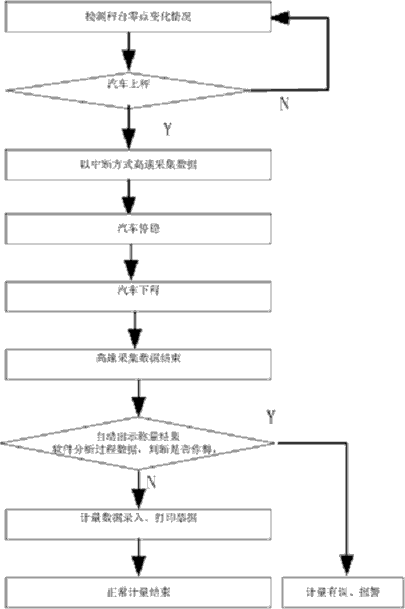
圖 4
五、結束語(yǔ)
該係統已在實際中投入使用,取得了較(jiào)好的效果。但(dàn)也存在(zài)一些問題:如秤體條件較差或車輛上秤過快,容易使車輛帶來的振動幹擾加大,從而影響判別的(de)準確性。
軟件對汽車衡各種作弊方式雖然不能都解(jiě)決,也有一定局限性。但它為我們解決這些問題提供了一種新的方法,也為維護企業在計量(liàng)工作中的經濟利益增添(tiān)了一道新的防線




